This is the Interface class to define the controls for the simple magnet hardware. More...
Public Member Functions | |
| def | __init__ (self, config, kwargs) |
| def | on_activate (self) |
| Definition and initialisation of the GUI. | |
| def | on_deactivate (self) |
| Deactivate the module properly. | |
| def | get_constraints (self) |
| Retrieve the hardware constrains from the motor device. More... | |
| def | move_rel (self, param_dict) |
| Moves magnet in given direction (relative movement) More... | |
| def | move_abs (self, param_dict) |
| Moves magnet to absolute position (absolute movement) More... | |
| def | abort (self) |
| Stops movement of the stage. More... | |
| def | get_pos (self, param_list=None) |
| Gets current position of the magnet stage arms. More... | |
| def | get_status (self, param_list=None) |
| Get the status of the position. More... | |
| def | calibrate (self, param_list=None) |
| Calibrates the magnet stage. More... | |
| def | get_velocity (self, param_list=None) |
| Gets the current velocity for all connected axes. More... | |
| def | set_velocity (self, param_dict=None) |
| Write new value for velocity. More... | |
| def | tell (self, param_dict=None) |
| Send a command to the magnet. More... | |
| def | ask (self, param_dict=None) |
| Ask the magnet a question. More... | |
| def | set_magnet_idle_state (self, magnet_idle=True) |
| Set the magnet to couple/decouple to/from the control. More... | |
| def | get_magnet_idle_state (self) |
| Retrieve the current state of the magnet, whether it is idle or not. More... | |
| def | initialize (self) |
 Public Member Functions inherited from core.module.BaseMixin Public Member Functions inherited from core.module.BaseMixin | |
| def | __init__ (self, manager, name, config=None, callbacks=None, kwargs) |
| Initialise Base class object and set up its state machine. More... | |
| def | log (self) |
| Returns a logger object. | |
| def | is_module_threaded (self) |
| Returns whether the module shall be started in a thread. | |
| def | on_activate (self) |
| Method called when module is activated. More... | |
| def | on_deactivate (self) |
| Method called when module is deactivated. More... | |
| def | getStatusVariables (self) |
| Return a dict of variable names and their content representing the module state for saving. More... | |
| def | setStatusVariables (self, variableDict) |
| Give a module a dict of variable names and their content representing the module state. More... | |
| def | getConfiguration (self) |
| Return the configration dictionary for this module. More... | |
| def | get_connector (self, connector_name) |
| Return module connected to the given named connector. More... | |
| Public Member Functions inherited from core.module.ModuleMeta | |
| def | __new__ (cls, name, bases, attrs) |
| Collect declared Connectors, ConfigOptions and StatusVars into dictionaries. More... | |
Additional Inherited Members | |
| Public Attributes inherited from core.module.BaseMixin | |
| module_state | |
| connectors | |
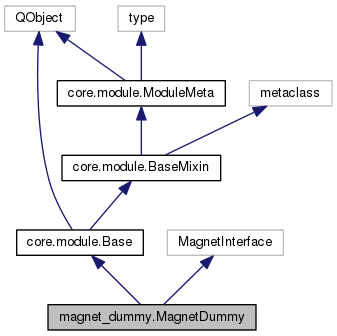
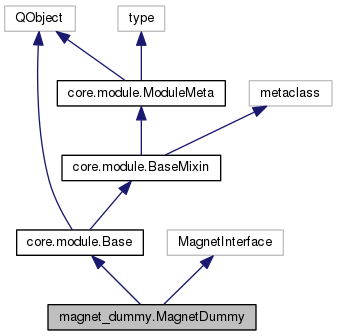
Detailed Description
This is the Interface class to define the controls for the simple magnet hardware.
Example config for copy-paste:
magnet_dummy: module 'magnet.magnet_dummy.MagnetDummy'
Member Function Documentation
◆ abort()
| def magnet_dummy.MagnetDummy.abort | ( | self | ) |
Stops movement of the stage.
- Returns
- int: error code (0:OK, -1:error)
◆ ask()
| def magnet_dummy.MagnetDummy.ask | ( | self, | |
param_dict = None |
|||
| ) |
Ask the magnet a question.
- Parameters
-
dict param_dict: dictionary, which passes all the relevant parameters, which should be changed. Usage: {'axis_label': <the question="" string>="">}. 'axis_label' must correspond to a label given to one of the axis.
- Returns
- string: contains the answer coming from the magnet
◆ calibrate()
| def magnet_dummy.MagnetDummy.calibrate | ( | self, | |
param_list = None |
|||
| ) |
Calibrates the magnet stage.
- Parameters
-
dict param_list: param_list: optional, if a specific calibration of an axis is desired, then the labels of the needed axis should be passed in the param_list. If nothing is passed, then all connected axis will be calibrated.
- Returns
- int: error code (0:OK, -1:error)
After calibration the stage moves to home position which will be the zero point for the passed axis. The calibration procedure will be different for each stage.
◆ get_constraints()
| def magnet_dummy.MagnetDummy.get_constraints | ( | self | ) |
Retrieve the hardware constrains from the motor device.
- Returns
- dict: dict with constraints for the magnet hardware. These constraints will be passed via the logic to the GUI so that proper display elements with boundary conditions could be made.
Provides all the constraints for each axis of a motorized stage (like total travel distance, velocity, ...) Each axis has its own dictionary, where the label is used as the identifier throughout the whole module. The dictionaries for each axis are again grouped together in a constraints dictionary in the form
{'<label_axis0>': axis0 }
where axis0 is again a dict with the possible values defined below. The possible keys in the constraint are defined here in the interface file. If the hardware does not support the values for the constraints, then insert just None. If you are not sure about the meaning, look in other hardware files to get an impression.
◆ get_magnet_idle_state()
| def magnet_dummy.MagnetDummy.get_magnet_idle_state | ( | self | ) |
Retrieve the current state of the magnet, whether it is idle or not.
- Returns
- bool: the actual state which was set in the magnet hardware. True = idle, decoupled from control False = Not Idle, coupled to control
◆ get_pos()
| def magnet_dummy.MagnetDummy.get_pos | ( | self, | |
param_list = None |
|||
| ) |
Gets current position of the magnet stage arms.
- Parameters
-
list param_list: optional, if a specific position of an axis is desired, then the labels of the needed axis should be passed as the param_list. If nothing is passed, then from each axis the position is asked.
- Returns
- dict: with keys being the axis labels and item the current position.
◆ get_status()
| def magnet_dummy.MagnetDummy.get_status | ( | self, | |
param_list = None |
|||
| ) |
Get the status of the position.
- Parameters
-
list param_list: optional, if a specific status of an axis is desired, then the labels of the needed axis should be passed in the param_list. If nothing is passed, then from each axis the status is asked.
- Returns
- dict: with the axis label as key and the status number as item.
◆ get_velocity()
| def magnet_dummy.MagnetDummy.get_velocity | ( | self, | |
param_list = None |
|||
| ) |
Gets the current velocity for all connected axes.
- Parameters
-
dict param_list: optional, if a specific velocity of an axis is desired, then the labels of the needed axis should be passed as the param_list. If nothing is passed, then from each axis the velocity is asked.
- Returns
- dict : with the axis label as key and the velocity as item.
◆ move_abs()
| def magnet_dummy.MagnetDummy.move_abs | ( | self, | |
| param_dict | |||
| ) |
Moves magnet to absolute position (absolute movement)
- Parameters
-
dict param_dict: dictionary, which passes all the relevant parameters, which should be changed. Usage: {'axis_label': <a-value>}. 'axis_label' must correspond to a label given to one of the axis. A smart idea would be to ask the position after the movement.
◆ move_rel()
| def magnet_dummy.MagnetDummy.move_rel | ( | self, | |
| param_dict | |||
| ) |
Moves magnet in given direction (relative movement)
- Parameters
-
dict param_dict: dictionary, which passes all the relevant parameters, which should be changed. With get_constraints() you can obtain all possible parameters of that stage. According to this parameter set you have to pass a dictionary with keys that are called like the parameters from get_constraints() and assign a SI value to that. For a movement in x the dict should e.g. have the form: dict = { 'x' : 23 } where the label 'x' corresponds to the chosen axis label.
A smart idea would be to ask the position after the movement.
◆ set_magnet_idle_state()
| def magnet_dummy.MagnetDummy.set_magnet_idle_state | ( | self, | |
magnet_idle = True |
|||
| ) |
Set the magnet to couple/decouple to/from the control.
- Parameters
-
bool magnet_idle: if True then magnet will be set to idle and each movement command will be ignored from the hardware file. If False the magnet will react on movement changes of any kind.
- Returns
- bool: the actual state which was set in the magnet hardware. True = idle, decoupled from control False = Not Idle, coupled to control
◆ set_velocity()
| def magnet_dummy.MagnetDummy.set_velocity | ( | self, | |
param_dict = None |
|||
| ) |
Write new value for velocity.
- Parameters
-
dict param_dict: dictionary, which passes all the relevant parameters, which should be changed. Usage: {'axis_label': <the-velocity-value>}. 'axis_label' must correspond to a label given to one of the axis.
◆ tell()
| def magnet_dummy.MagnetDummy.tell | ( | self, | |
param_dict = None |
|||
| ) |
Send a command to the magnet.
- Parameters
-
dict param_dict: dictionary, which passes all the relevant parameters, which should be changed. Usage: {'axis_label': <the command="" string>="">}. 'axis_label' must correspond to a label given to one of the axis.
- Returns
- int: error code (0:OK, -1:error)
The documentation for this class was generated from the following file:
- hardware/magnet/magnet_dummy.py
