PWM controller restricted to positive values. More...
Inheritance diagram for pi_pwm.PiPWMHalf:

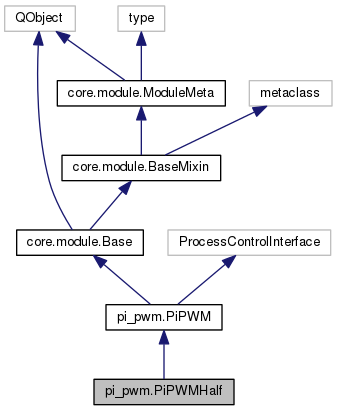
Collaboration diagram for pi_pwm.PiPWMHalf:
Public Member Functions | |
| def | __init__ (self, kwargs) |
| def | getControlLimits (self) |
| Get minimum and maxuimum value for control value. More... | |
 Public Member Functions inherited from pi_pwm.PiPWM Public Member Functions inherited from pi_pwm.PiPWM | |
| def | __init__ (self, kwargs) |
| def | on_activate (self) |
| Activate module. | |
| def | on_deactivate (self) |
| Deactivate module. | |
| def | setupPins (self) |
| Set Raspberry Pi GPIO pins to the right mode. | |
| def | startPWM (self) |
| Start the PWM output. | |
| def | stopPWM (self) |
| Stop the PWM output. | |
| def | changeDutyCycle (self, duty) |
| Set the PWM duty cycle in percent. More... | |
| def | setControlValue (self, value) |
| Set control value for this controller. More... | |
| def | getControlValue (self) |
| Get control value for this controller. More... | |
| def | getControlUnit (self) |
| Get unit for control value. More... | |
| def | getControlLimits (self) |
| Get minimum and maxuimum value for control value. More... | |
| Public Member Functions inherited from core.module.BaseMixin | |
| def | __init__ (self, manager, name, config=None, callbacks=None, kwargs) |
| Initialise Base class object and set up its state machine. More... | |
| def | log (self) |
| Returns a logger object. | |
| def | is_module_threaded (self) |
| Returns whether the module shall be started in a thread. | |
| def | on_activate (self) |
| Method called when module is activated. More... | |
| def | on_deactivate (self) |
| Method called when module is deactivated. More... | |
| def | getStatusVariables (self) |
| Return a dict of variable names and their content representing the module state for saving. More... | |
| def | setStatusVariables (self, variableDict) |
| Give a module a dict of variable names and their content representing the module state. More... | |
| def | getConfiguration (self) |
| Return the configration dictionary for this module. More... | |
| def | get_connector (self, connector_name) |
| Return module connected to the given named connector. More... | |
| Public Member Functions inherited from core.module.ModuleMeta | |
| def | __new__ (cls, name, bases, attrs) |
| Collect declared Connectors, ConfigOptions and StatusVars into dictionaries. More... | |
Public Attributes | |
| threadlock | |
| Public Attributes inherited from pi_pwm.PiPWM | |
| threadlock | |
| inapin | |
| inbpin | |
| pwmpin | |
| enapin | |
| enbpin | |
| diapin | |
| dibpin | |
| fanpin | |
| p | |
| dutycycle | |
| Public Attributes inherited from core.module.BaseMixin | |
| module_state | |
| connectors | |
Additional Inherited Members | |
| Static Public Attributes inherited from pi_pwm.PiPWM | |
| channel = ConfigOption('channel', 0, missing='warn') | |
| freq = ConfigOption('frequency', 100) | |
Detailed Description
PWM controller restricted to positive values.
Member Function Documentation
◆ getControlLimits()
| def pi_pwm.PiPWMHalf.getControlLimits | ( | self | ) |
Get minimum and maxuimum value for control value.
- Returns
- tuple(float, float): min and max control value
The documentation for this class was generated from the following file:
- hardware/pi_pwm.py
