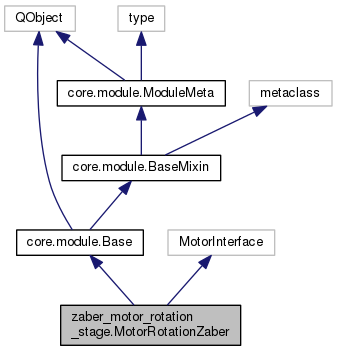
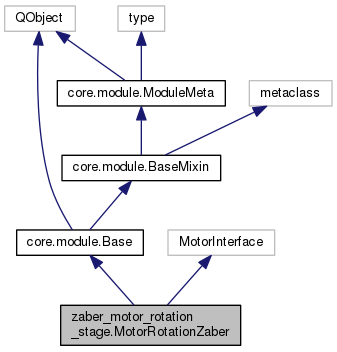
unstable Christoph Müller, Simon Schmitt This is the Interface class to define the controls for the simple microwave hardware. More...
Public Member Functions | |
| def | __init__ (self, kwargs) |
| def | on_activate (self) |
| Initialisation performed during activation of the module. | |
| def | on_deactivate (self) |
| Deinitialisation performed during deactivation of the module. | |
| def | get_constraints (self) |
| Retrieve the hardware constrains from the motor device. More... | |
| def | move_rel (self, param_dict) |
| Moves stage by a given angle (relative movement) More... | |
| def | move_abs (self, param_dict) |
| Moves stage to an absolute angle (absolute movement) More... | |
| def | abort (self) |
| Stops movement of the stage. More... | |
| def | get_pos (self, param_list=None) |
| Gets current position of the rotation stage. More... | |
| def | get_status (self, param_list=None) |
| Get the status of the position. More... | |
| def | calibrate (self, param_list=None) |
| Calibrates the rotation motor. More... | |
| def | get_velocity (self, param_list=None) |
| Asks current value for velocity. More... | |
| def | set_velocity (self, param_dict) |
| Write new value for velocity. More... | |
 Public Member Functions inherited from core.module.BaseMixin Public Member Functions inherited from core.module.BaseMixin | |
| def | __init__ (self, manager, name, config=None, callbacks=None, kwargs) |
| Initialise Base class object and set up its state machine. More... | |
| def | log (self) |
| Returns a logger object. | |
| def | is_module_threaded (self) |
| Returns whether the module shall be started in a thread. | |
| def | on_activate (self) |
| Method called when module is activated. More... | |
| def | on_deactivate (self) |
| Method called when module is deactivated. More... | |
| def | getStatusVariables (self) |
| Return a dict of variable names and their content representing the module state for saving. More... | |
| def | setStatusVariables (self, variableDict) |
| Give a module a dict of variable names and their content representing the module state. More... | |
| def | getConfiguration (self) |
| Return the configration dictionary for this module. More... | |
| def | get_connector (self, connector_name) |
| Return module connected to the given named connector. More... | |
| Public Member Functions inherited from core.module.ModuleMeta | |
| def | __new__ (cls, name, bases, attrs) |
| Collect declared Connectors, ConfigOptions and StatusVars into dictionaries. More... | |
Static Public Attributes | |
| velocity_conversion = ConfigOption('zaber_speed_conversion', 9.375, missing='warn') | |
Additional Inherited Members | |
| Public Attributes inherited from core.module.BaseMixin | |
| module_state | |
| connectors | |
Detailed Description
unstable Christoph Müller, Simon Schmitt This is the Interface class to define the controls for the simple microwave hardware.
Example config for copy-paste:
motorstage_zaber: module 'motor.zaber_motor_rotation_stage.MotorRotationZaber' com_port_zaber 'ASRL1::INSTR' zaber_baud_rate 9600 zaber_timeout 1000 zaber_term_char '
'
zaber_axis_label 'phi' zaber_angle_min -1e5 # in degrees zaber_angle_max 1e5 # in degrees zaber_angle_step 1e-5 # in degrees
zaber_velocity_min 1e-3 # in degrees/s zaber_velocity_max 10 # in degrees/s zaber_velocity_step -1e-3 # in degrees/s
zaber_micro_step_size 234.375e-6 zaber_speed_conversion 9.375
Member Function Documentation
◆ abort()
| def zaber_motor_rotation_stage.MotorRotationZaber.abort | ( | self | ) |
Stops movement of the stage.
- Returns
- int: error code (0:OK, -1:error)
◆ calibrate()
| def zaber_motor_rotation_stage.MotorRotationZaber.calibrate | ( | self, | |
param_list = None |
|||
| ) |
Calibrates the rotation motor.
- Parameters
-
list param_list: Dictionary with axis name
- Returns
- dict pos: Dictionary with axis name and pos in deg
◆ get_constraints()
| def zaber_motor_rotation_stage.MotorRotationZaber.get_constraints | ( | self | ) |
Retrieve the hardware constrains from the motor device.
- Returns
- dict: dict with constraints for the sequence generation and GUI
Provides all the constraints for the xyz stage and rot stage (like total movement, velocity, ...) Each constraint is a tuple of the form (min_value, max_value, stepsize)
◆ get_pos()
| def zaber_motor_rotation_stage.MotorRotationZaber.get_pos | ( | self, | |
param_list = None |
|||
| ) |
Gets current position of the rotation stage.
- Parameters
-
list param_list: List with axis name
- Returns
- dict pos: Dictionary with axis name and pos in deg
◆ get_status()
| def zaber_motor_rotation_stage.MotorRotationZaber.get_status | ( | self, | |
param_list = None |
|||
| ) |
Get the status of the position.
- Parameters
-
list param_list: optional, if a specific status of an axis is desired, then the labels of the needed axis should be passed in the param_list. If nothing is passed, then from each axis the status is asked.
- Returns
- dict status: · 0 - idle, not currently executing any instructions · 1 - executing a home instruction · 10 - executing a manual move (i.e. the manual control knob is turned) · 20 - executing a move absolute instruction · 21 - executing a move relative instruction · 22 - executing a move at constant speed instruction · 23 - executing a stop instruction (i.e. decelerating)
◆ get_velocity()
| def zaber_motor_rotation_stage.MotorRotationZaber.get_velocity | ( | self, | |
param_list = None |
|||
| ) |
Asks current value for velocity.
- Parameters
-
list param_list: Dictionary with axis name
- Returns
- dict velocity: Dictionary with axis name and velocity in deg/s
◆ move_abs()
| def zaber_motor_rotation_stage.MotorRotationZaber.move_abs | ( | self, | |
| param_dict | |||
| ) |
Moves stage to an absolute angle (absolute movement)
- Parameters
-
dict param_dict: Dictionary with axis name and target position in deg
- Returns
- dict velocity: Dictionary with axis name and final position in deg
◆ move_rel()
| def zaber_motor_rotation_stage.MotorRotationZaber.move_rel | ( | self, | |
| param_dict | |||
| ) |
Moves stage by a given angle (relative movement)
- Parameters
-
dict param_dict: Dictionary with axis name and relative movement in deg
- Returns
- dict velocity: Dictionary with axis name and final position in deg
◆ set_velocity()
| def zaber_motor_rotation_stage.MotorRotationZaber.set_velocity | ( | self, | |
| param_dict | |||
| ) |
Write new value for velocity.
- Parameters
-
dict param_dict: Dictionary with axis name and target velocity in deg/s
- Returns
- dict velocity: Dictionary with axis name and target velocity in deg/s
The documentation for this class was generated from the following file:
- hardware/motor/zaber_motor_rotation_stage.py
